机器人打磨工作站基本实现了技术壁垒的突破,开发了具有自主知识产权的EDRC技术、敏捷保护技术、3D视觉技术、信息化技术等先进技术,并针对柴油发动机机体、缸盖铸件披缝、浇冒口及残根的自动磨削和打磨,构建了智能自动生产线,验证了所开发的打磨工作站可以满足打磨机器人在铸件清理打磨环节高精度、高效率的要求,满足了复杂曲面中大型铸件清理自动化、集约化、连续化、智能化高效生产的作业要求。
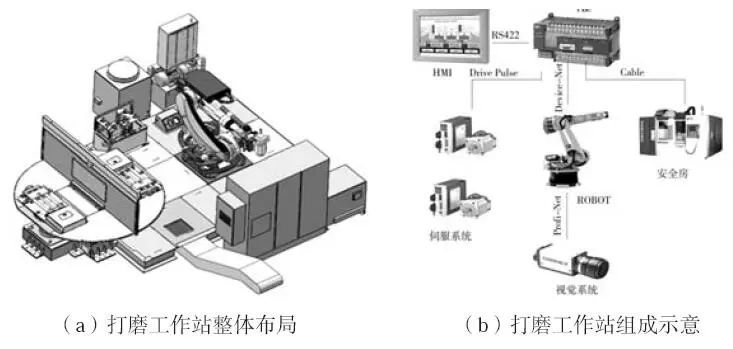
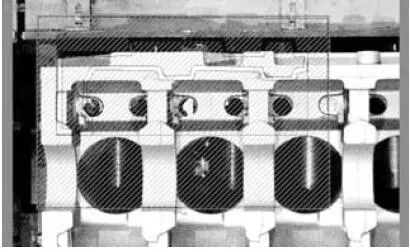
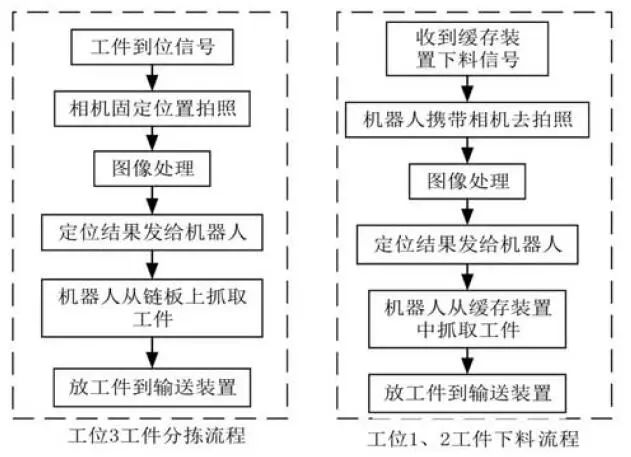
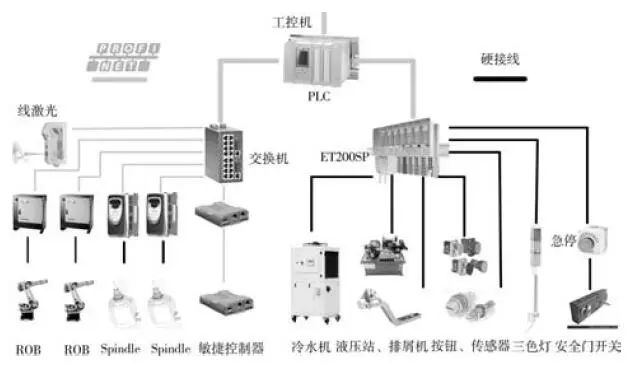
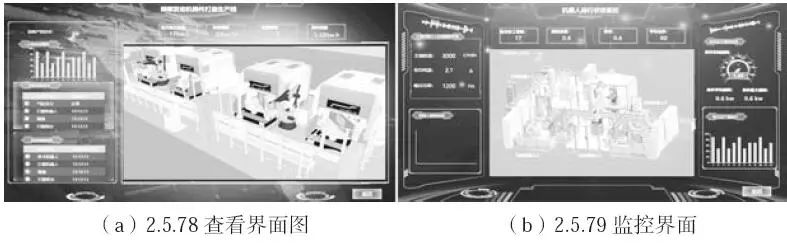
机器人打磨工作站是采用机床的高刚性、高效率和密闭防护的设计理念和设计技术,结合机器人高柔性特征,融入数据的可视化和信息集成化技术形成全新的打磨单元。机器人打磨工作站由工件定位系统、安全房和安全锁等组成的安全防护系统、电主轴、刀柄刀具和三维激光扫描仪等组成的清理加工系统、地基底座、打磨机器人系统、冷却系统、刀库系统、液压系统、气路系统、软件控制系统和排屑系统构成。标准化机器人打磨单元如图2所示。 该机器人打磨工作站可以满足披缝、残根、毛刺、飞边等清理打磨的需求,清理打磨后的残根小于±0.2 mm,其关键性能指标如表1所示。视觉定位系统主要由机器人、装在机器人末端的相机、装在链板线上方相机支架上的相机、视觉控制器等组成,辅助机器人完成链板线上单体缸盖的定位抓取和缓存托盘装置上工件的定位抓取,其图像采集效果如图3。 视觉定位系统实现流程如图4所示,相机安装在链板线上方支架上,当机器人和控制器收到工件到位信号后,引导相机进行拍照,在视觉控制器中对采集图片进行图像处理和计算,并将计算结果发送给机器人,机器人根据定位结果抓取工具,并放到输送装置上去,一个工作流程便算完成。当机器人和视觉控制器收到下料信号后,机器人携带各自的相机走到相机拍照点,视觉控制器通知相机采集托盘中的工件图片。 设机器人坐标系为Q,线激光传感器坐标系为P,P到Q的旋转矩阵和偏移矩阵分别为R和T,设空间某一点B在Q和P坐标系下的齐次坐标分别为Qb(X,Y,1),Pb(x,y,1),Pb和Qb之间转换关系如公式(1)所示: 式中:R代表线激光传感器坐标系到机器人坐标系的旋转矩阵,t代表偏移量,SToBMat2D为标定圆圆心在线激光传感器中的坐标和机器人坐标系中的坐标的变换关系。打磨工作站控制系统如图5所示,主体由机器人、电主轴、干燥机、水冷系统、液压系统、刀具库和一套工控机组成。系统通过PROFINET构成分层网络结构,同时配置激光矫正功能,对铸件定位和尺寸进行检查,对打磨机器人打磨轨迹进行调整优化,提高打磨精度。 除了基础的数据监控,平台还支持更多的展示,如图6所示,这是发动机铸件打磨生产线的相关映射,包括现场实时运行的视频内容、基于数字孪生架构的建模仿真和基础的机器人状态监测。在总体页面内,还有当前现场实时状况与数据,查看页面如图6a所示,可以查看当前生产线具体的实时状况,包括生产线状态、完成情况、设备状态等。同样的,机器人运行状态也有监控,如图6b所示,可以查看机器人主轴详情,状态、能耗、产量等。